隨著移動互聯網的飛速發展和在線娛樂需求的激增,各類演出、賽事、交通票務的線上銷售變得日益火爆。傳統的票務平臺往往面臨高并發訪問壓力大、用戶體驗不佳、黃牛囤票等問題。針對這一痛點,本文設計并實現了一個基于SpringBoot后端框架與微信小程序前端的智能搶票系統(項目代號:t366u),旨在提供一個高效、穩定、公平且用戶體驗優良的票務服務平臺。
一、 系統總體設計
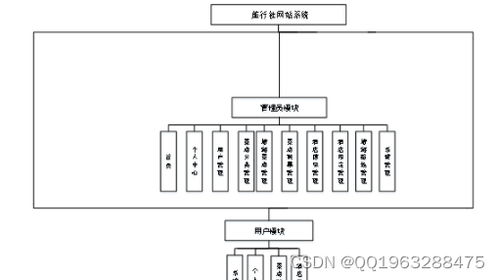
本系統采用前后端分離的架構模式,充分發揮各自技術棧的優勢。
1. 后端架構(SpringBoot)
后端作為系統的核心,負責所有業務邏輯、數據處理和安全保障。采用SpringBoot框架,能夠快速搭建、簡化配置,并集成豐富的Spring生態組件。
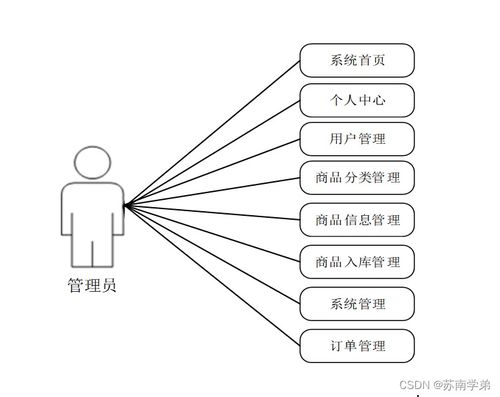
- 業務模塊:主要包括用戶管理、票務信息管理(演出/場次/座位)、訂單管理、支付集成(如微信支付)、搶票活動管理、系統配置等。
- 技術要點:
- 使用MyBatis-Plus作為ORM框架,提升數據庫操作效率。
- 集成Redis作為緩存和分布式鎖的核心組件,用于緩存熱點票務數據、用戶會話以及實現高并發下的搶票鎖機制,防止超賣。
- 使用消息隊列(如RabbitMQ或RocketMQ)對搶票請求進行異步削峰和解耦,將瞬時高并發的下單請求排隊處理,保障系統穩定性。
- 通過Spring Security或JWT(JSON Web Token)實現安全的用戶認證與授權。
- 數據庫選用MySQL,針對票務庫存、訂單狀態等設計事務處理,確保數據一致性。
2. 前端架構(微信小程序)
微信小程序具有無需下載、即用即走、用戶基數龐大的特點,是票務服務的理想入口。
- 功能模塊:用戶登錄/注冊(微信一鍵授權)、票務瀏覽與搜索、場次與座位可視化選擇、搶票活動提醒與倒計時、訂單創建與支付、個人中心(訂單歷史、我的票夾)等。
- 技術要點:
- 使用小程序原生框架或uni-app等跨端框架進行開發,保證性能和兼容性。
- 通過WebSocket或定時輪詢與后端保持通信,實現搶票開始時的實時推送和狀態更新。
- 設計簡潔直觀的UI/UX,優化搶票路徑,確保用戶能在最短時間內完成操作。
3. 系統服務(t366u)
“計算機系統服務”在此項目中體現為系統部署、運維監控與安全保障。
- 部署:采用Docker容器化技術,配合Nginx實現反向代理和負載均衡,將SpringBoot應用、Redis、MySQL等組件部署在云服務器上,實現彈性伸縮。
- 監控:集成Spring Boot Admin、Prometheus和Grafana等工具,對應用性能、JVM狀態、接口響應時間、異常情況進行實時監控與告警。
- 安全:實施HTTPS通信、SQL注入與XSS攻擊防護、接口限流與防刷策略,并定期進行安全審計與漏洞掃描。
二、 核心功能實現:高并發搶票
搶票功能是本系統的核心挑戰,其關鍵在于應對瞬時超高并發。系統設計了一套多層次的解決方案:
- 頁面靜態化與CDN加速:將票務詳情等不常變動的頁面靜態化,并通過CDN分發,減輕后端服務器壓力。
- 緩存預熱:在搶票活動開始前,將熱門場次的庫存數據預加載至Redis緩存中。
- 隊列緩沖:用戶點擊“立即搶票”后,請求并不直接處理庫存,而是進入消息隊列。后端服務按順序從隊列中消費請求,進行庫存校驗、扣減和訂單創建。
- 分布式鎖:在扣減緩存庫存的關鍵環節,使用Redis分布式鎖(如Redisson實現)確保同一張票在同一時刻只能被一個請求處理,杜絕超賣。
- 限流與降級:在網關層或應用層對搶票接口進行限流(如令牌桶算法),當流量超過閾值時,快速失敗返回友好提示,保護后端服務。為非核心服務(如推薦、評論)準備降級策略,保障核心鏈路暢通。
- 異步處理與結果返回:訂單創建和支付成功后,通過小程序消息訂閱或輪詢方式通知用戶結果,避免用戶長時間等待。
三、 系統優勢與創新點
- 高性能與高可用:通過微服務思想(可將搶票核心邏輯獨立為服務)、緩存、隊列、分布式等技術,系統能承受萬級乃至更高QPS的并發沖擊。
- 公平性保障:采用“隊列+先到先得”的機制,結合防機器人驗證(如小程序圖形驗證碼),有效遏制黃牛刷票,提升普通用戶的購票成功率。
- 用戶體驗優異:微信小程序提供了便捷的入口和流暢的交互,結合清晰的搶票流程和實時反饋,提升了用戶滿意度。
- 可維護性與擴展性:前后端分離和模塊化設計使得系統易于維護和功能擴展,未來可輕松接入更多票務類型或營銷活動。
四、 與展望
本文詳細闡述了一個基于SpringBoot和微信小程序的智能搶票系統t366u從設計到實現的關鍵技術方案。該系統不僅解決了高并發場景下的技術難題,也注重了業務公平性和終端用戶體驗。作為計算機畢業設計,它涵蓋了軟件工程、數據庫、網絡通信、分布式系統等多個核心知識領域,具有很高的實踐價值。可考慮引入人工智能算法進行熱門場次預測、個性化推薦,或利用區塊鏈技術增強票務流轉的透明性與防偽能力,進一步優化系統。